■考察■
今までも動いていたけどノイズに埋もれてわからなかった、というのが真相だと思います。動かなかったバージョンでは100-10000回のカウントを終えるとLoopを抜けていました。これはESP-WROOM-02にはWDTがついていて、約1秒間loop()から抜けないとリセットがかかるのです。
何となくloop()抜けてもすぐに帰ってくるんだろ、ぐらいに考えていたんですが、これが想定以上に大きくて、抜けるたびに処理が止まってノイズとなっていました。loopから抜けるのをやめてESP.wtdFeed()にしたところ、かすかなノイズは入りますがマイクの前の音声がちゃんとADCから出力されるようになりました。
■ソース■
loopの値は100(サンプリング周波数10khz)ぐらいが良いようで、10(100khz)だとDACに出力するためのブランクの比率が著しいノイズとなり1000(1khz)にすると割れて何が何だか、という感じでした。また、countとして++だけでなく--も入れてみたところ、音量がかなり大きくなりました。100の場合で値は-100〜+100まで振れるので、精度は8bit、速度は10khzということになります。お騒がせしました&ありがとうございました>電子工作部各位殿
もうちょっと高速のCPUが使えれば、DAC出力その他のための中断を回避できるので、もっといい音になると思います。現状で160Mhzクロックの32bit CPUなので、これより上のCPUを用意するよりはFPGAで作るべきものだと思います。約400円で専用チップ売ってるんですけどねw
ちなみにマイクの性能には「14bit相当・10khz」とのこと。うーん、どういう演算処理をすればそういう信号が得られるのでしょう。思いついたらまた試してみます。
■使用部品紹介という名のCM■
今回の実験では、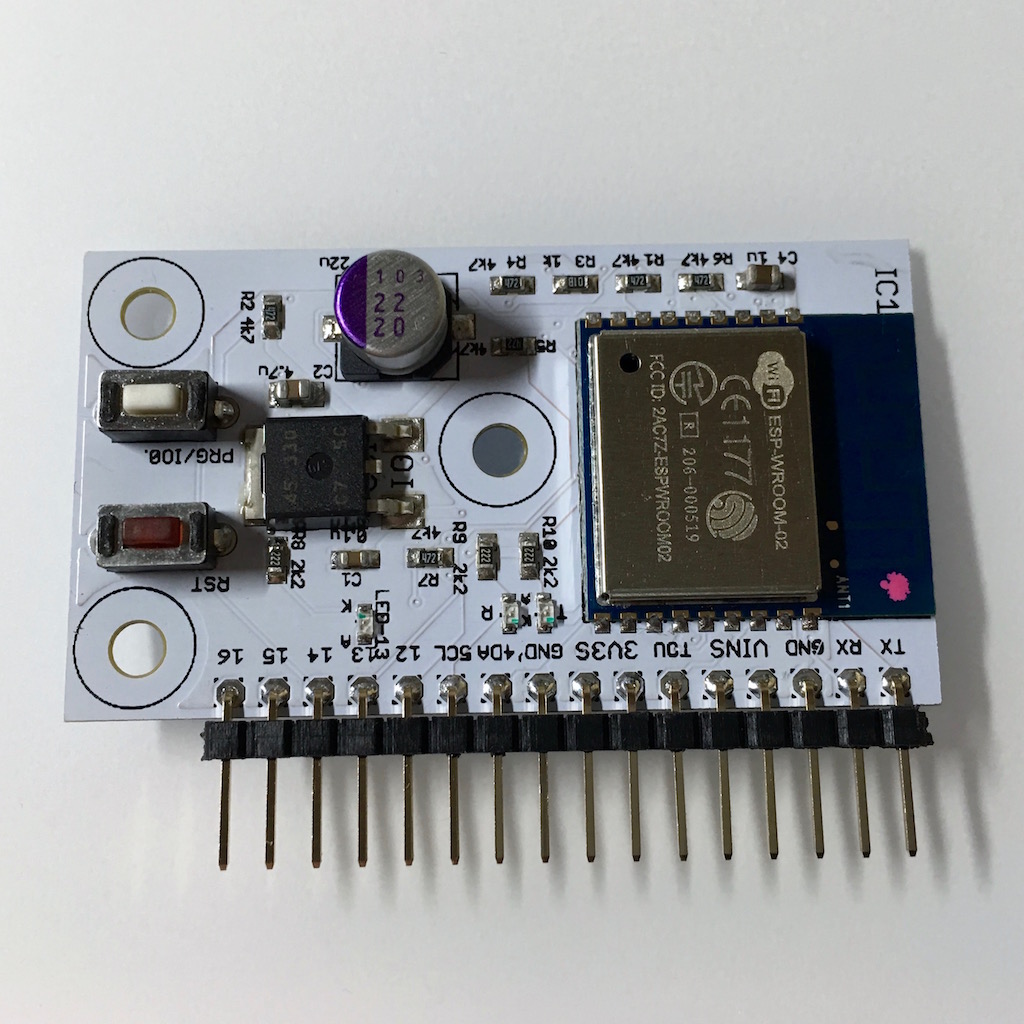 |
| 同社サイトより |
スイッチサイエンス「Board1 ver.1.0」ESP-WROOM-02搭載モジュール、
 |
| 同社サイトより |
 |
| 同社サイトより |
を使用しました。
マイクモジュールとアンプへの3v3はBoard1搭載の安定化電源から供給しています。何かと電源にシビアなESPですが、(プログラムのバグ以外では)安定して動作しています。
タフな電源にしといてよかった…と設計者は胸をなでおろすのであった(完)。
0 件のコメント:
コメントを投稿
注: コメントを投稿できるのは、このブログのメンバーだけです。